計(jì)算機(jī)網(wǎng)絡(luò)工程與信息系統(tǒng)集成 服務(wù)概述與PPT模板下載
在當(dāng)今數(shù)字化時(shí)代,計(jì)算機(jī)網(wǎng)絡(luò)工程與信息系統(tǒng)集成已成為企業(yè)和組織提升運(yùn)營(yíng)效率、實(shí)現(xiàn)信息互聯(lián)的關(guān)鍵驅(qū)動(dòng)力。本文簡(jiǎn)要介紹計(jì)算機(jī)系統(tǒng)集成服務(wù)的核心內(nèi)容,并提供一個(gè)實(shí)用的PPT模板下載指南,幫助專(zhuān)業(yè)人士在項(xiàng)目展示或培訓(xùn)中更有效地傳達(dá)信息。
一、計(jì)算機(jī)系統(tǒng)集成服務(wù)概述
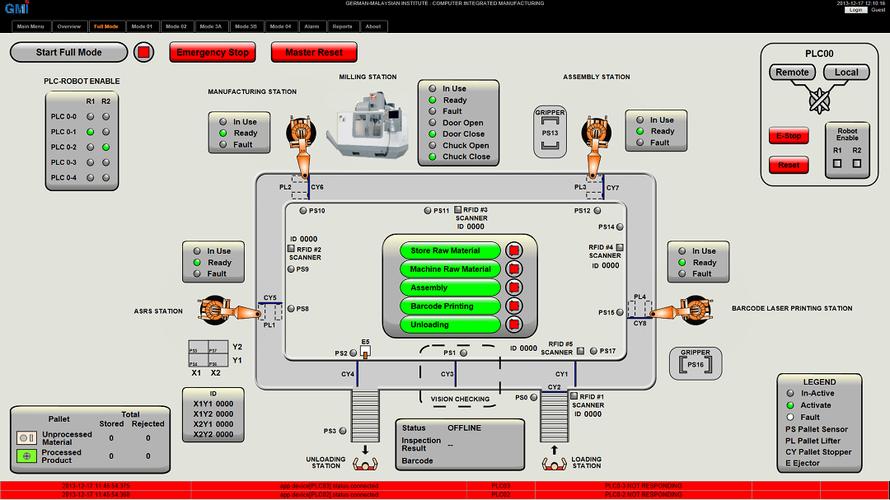
計(jì)算機(jī)系統(tǒng)集成服務(wù)是指將硬件、軟件、網(wǎng)絡(luò)和數(shù)據(jù)庫(kù)等獨(dú)立組件整合為一個(gè)統(tǒng)一的、高效運(yùn)行的信息系統(tǒng)。它涉及多個(gè)領(lǐng)域,包括網(wǎng)絡(luò)設(shè)計(jì)、服務(wù)器配置、安全策略實(shí)施以及應(yīng)用軟件開(kāi)發(fā)。關(guān)鍵優(yōu)勢(shì)包括:
- 提升系統(tǒng)兼容性:通過(guò)集成不同廠商的技術(shù),減少?zèng)_突,確保數(shù)據(jù)無(wú)縫流動(dòng)。
- 優(yōu)化資源利用:統(tǒng)一管理計(jì)算資源和存儲(chǔ),降低成本并提高性能。
- 增強(qiáng)安全性:集成安全協(xié)議和監(jiān)控系統(tǒng),防范網(wǎng)絡(luò)威脅。
- 支持業(yè)務(wù)擴(kuò)展:提供可擴(kuò)展的架構(gòu),適應(yīng)企業(yè)未來(lái)發(fā)展需求。
實(shí)際應(yīng)用中,系統(tǒng)集成涵蓋局域網(wǎng)(LAN)、廣域網(wǎng)(WAN)、云計(jì)算平臺(tái)和物聯(lián)網(wǎng)(IoT)等,助力企業(yè)實(shí)現(xiàn)數(shù)字化轉(zhuǎn)型。
二、PPT模板下載指南
為幫助您高效準(zhǔn)備演示材料,我們推薦以下資源用于下載與“計(jì)算機(jī)網(wǎng)絡(luò)工程與信息系統(tǒng)集成”相關(guān)的PPT模板:
- 專(zhuān)業(yè)網(wǎng)站訪問(wèn):訪問(wèn)SlideModel、SlidesCarnival或Template.net等平臺(tái),搜索關(guān)鍵詞如“網(wǎng)絡(luò)工程”、“系統(tǒng)集成”或“IT服務(wù)”,選擇設(shè)計(jì)現(xiàn)代、布局清晰的模板。
- 免費(fèi)與付費(fèi)選項(xiàng):許多網(wǎng)站提供免費(fèi)模板,但付費(fèi)版本通常包含更多定制功能和專(zhuān)業(yè)圖標(biāo)。建議根據(jù)需求選擇合適的版本。
- 自定義內(nèi)容:下載后,替換占位符文本為您的具體內(nèi)容,例如添加網(wǎng)絡(luò)拓?fù)鋱D、服務(wù)流程圖或案例分析,以增強(qiáng)演示的說(shuō)服力。
- 注意事項(xiàng):確保模板兼容您的演示軟件(如Microsoft PowerPoint或Google Slides),并檢查授權(quán)條款以避免侵權(quán)問(wèn)題。
通過(guò)使用這些模板,您可以節(jié)省時(shí)間,專(zhuān)注于內(nèi)容策劃,從而有效展示計(jì)算機(jī)系統(tǒng)集成服務(wù)的價(jià)值與實(shí)踐。
如若轉(zhuǎn)載,請(qǐng)注明出處:http://www.ecmg-global.com/product/31.html
更新時(shí)間:2026-05-26 23:12:17